
QV version 20240419 pre-alpha released
QV is a new very experimental Linux distribution, under development and still evolving. To read about what has happened so far, follow the blog posts with the "quirky" tag:
https://bkhome.org/news/tag_quirky.html
In a nutshell, QV has many features of EasyOS, except does not have a layered filesystem, nor SFS files. It is a "frugal full" installation, built from Void Linux packages using the XBPS package manager. It also has some EasyOS Kirkstone .tar.xz and PET packages. Another very significant feature is that QV is installed in a btrfs filesystem, with support for compression and snapshots.
I have been playing with a logo; this is the latest:

The letters "QV" may mean "Quirky Void", as this is a very quirky distribution compared with Void Linux. Or, it may mean "Quantum Vis", which is Latin for "has everything that you need".
Download from here:
https://distro.ibiblio.org/easyos/amd64/releases/void/
You can write the drive-image file to a USB Flash drive and boot that. Or, it can be installed directly to an internal HDD or SSD; with some caveats. See forum post for details:
https://forum.puppylinux.com/viewtopic.php?t=11292
If you look at the 'qv-installer' script, also at 'limine.cfg' in the drive-image file, you will see that "BOOT_UUID" and "BOOT_DIR" kernel parameters are now required, as well as WKG_UUID and WKG_DIR. The reason for this is that 'vmlinuz' and 'initrd' may be in a different partition than the working-partition, and an "update" operation will need to know where they are.
As there are no longer SFS files, the "devx" is now a PET package. It can be installed via PKGget, or downloaded directly from here:
https://distro.ibiblio.org/easyos/amd64/packages/pet/pet_packages-void/
In the latter case, right-click on it and choose "petget" from
the menu.
'devx-240419.pet' is a "meta package". What that means is that it doesn't contain any packages, just a 'pinstall.sh' script that will install everything required to setup a development environment. I suggest, take a snapshot first, before installing it, with an appropriate name, like "devx development evironment". Then, before doing any actual compiling, take a snapshot of the snapshot, to retain a pristine devx environment.
I'm not sure, but I think best to run "xbps-install -S" first, before installing the devx PET, to sync with the remote repositories.
XBPS will download 624 packages, a total of 592MB, so be prepared for it to take awhile.
After install has finished, delete /etc/profile.d/gawk.csh and /etc/profile.d/gawk.sh -- these are broken.
If you want to install with "new2dir make install", the 'installwatch' package is required. Download it from here:
...download, right-click and choose "petget" to install it.
You will notice that there is no longer an "update" icon on the desktop. This is because updating will mostly be done via XBPS. It is intended that there will also be a kernel PET and an update PET that will have fixes.
This update strategy has yet to be implemented. It will mean that you only have to download the big .img file once, and there-after rely on XBPS to update packages, and kernel and patch PETs.
Feedback welcome at the forum.
Tags: quirky
Connecting trike front suspension to frame
Continuing my recumbent trike front suspension project, this is the previous post:
https://bkhome.org/news/202403/considering-heim-joints-for-wheel-knuckles.html
Getting close to putting it together, decided today to post about an aspect of the project that is rather weird...
My trike is a TrikExplor/Motrike with a "320" frame. There are various models based on this frame, for example:
https://www.motrike.com/product-item/rear-suspension-recumbent-trike/

So, there is a central frame tube, and a cross-beam to which the
wheels are attached. Where the weirdness comes in, is the
cross-beam is attached to the central frame at a hinge-point,
complete with ball bearings ...except, it doesn't actually hinge.
If you look carefully at the above photo, there is another member
coming out from the cross-beam and attached to the central-frame,
locking the cross-beam at 90 degrees to the central-frame.
Hinging, that is, steering, occurs at the wheels, as is done for all recumbent trikes.
So why the ball-bearing join, when it doesn't hinge? The only reason I can think of is that the 320 frame was designed as a basis for many different trike designs, including the possibility of swivelling the entire cross-beam.
When I bought this, I hardly knew anything about trike design.
Soon after buying it, I was thinking, if starting again, I would
buy a more "normal" trike frame; however, most trikes weld the
cross-beam onto the main frame, so I would have had to cut it off,
then weld new framework. Messy; at least this 320 frame, though
weird, does make it easy to detatch the cross-beam and fit
something new.
I think that a lot of these have been sold in the USA, so if someone reading this can obtain a secondhand one cheap, with a view to modifying it, then this blog post provides some useful information.
What I needed is a tube that will slide into the ball bearings, with some means of attaching a framework. This is what I put together:

The tube is 30mm OD aluminium, which is a perfect fit. Well, not quite. It is a perfect fit for the top-most bearing, but there is a very slight sloppiness sliding through the bottom bearing. Reason is, the tube needs to be painted, then the bottom bearing becomes a snug fit.
When I inserted the tube and pulled it out, the bottom bearing came out, that you can see in the photo. To the immediate right of the bearing, there is an adapter-ring that I took off the trike. Then to the right of that is an aluminium sleeve that I cut to length, so as to fine-tune the height of the suspension-frame relative to the trike-frame. That sleeve is 30mm ID, 40mm OD, but I had to sandpaper the inside a bit to get it to slide over the 30mm OD tube.
Here are where I obtained the parts:The 30mm pipe clamps. But, I see right now they are out of stock. Perhaps there are metal ones elsewhere in Aliexpress. There are plenty of plastic ones available, which would probably be strong enough. This is where I got mine:
https://www.aliexpress.com/item/1005005478071535.html
I purchased 30mm OD, 20mm ID, 240mm length aluminium pipe. Length is exactly right. Thicker wall than really needed. From here:
https://www.aliexpress.com/item/1005004347889082.html
The aluminium sleeve is 40mm OD, 5mm wall thickness, 100mm length, from here:
https://www.aliexpress.com/item/1005005964994480.html
I spray painted the tube with an etching primer, followed by a red gloss enamel. Just one thin coat of each.
A bit of a hassle attaching to the trike frame, but probably
better than having to cut off a cross-beam and weld new framework.
Hmmm, but I am going to end up needing a bit of welding to the
trike frame anyway.
The actual front suspension is just about ready to be put
together; that will be a future blog post. That piece of pine is
misleading; there is a lot more to it, with metal
reinforcing.
Tags: light
More /etc/init.d replacements for runit
QV, like EasyOS, and before that Quirky and the various pups that I maintained, uses the simple busybox init, with start/stop scripts in /etc/init.d. Except, for QV and EasyOS, there is service management with enhanced pup_event.
Void Linux uses runit to manage services. QV is capable of launching the runit daemon and using runit; however, I would prefer to stay with /etc/init.d, as it is very simple and works flawlwessly. Besides, it is what I know.
woofQV, the QV builder, has a 'packages-templates' directory that can modify any package installation. I have anticipated future packages that a user might want to install, and added /etc/init.d scripts where needed to replace runit.
Here is the commit:
https://github.com/bkauler/woof-quantum-vis/commit/507ebfad912b7a32f237ca147aa33d8228608744
Note, I got all of these from OpenEmbedded.
Tags: quirky
QV snapshot deletion
About two weeks ago, I posted about btrfs snapshot management in QV:
https://bkhome.org/news/202404/qv-snapshot-management.html
I have now added deletion of snapshots. There is a new item in the menu:
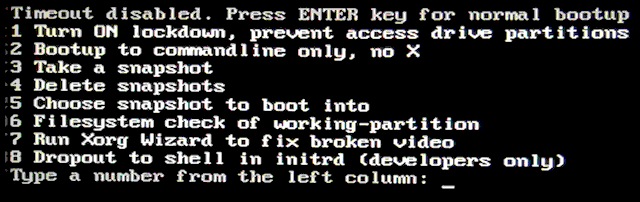
Choosing item-4:
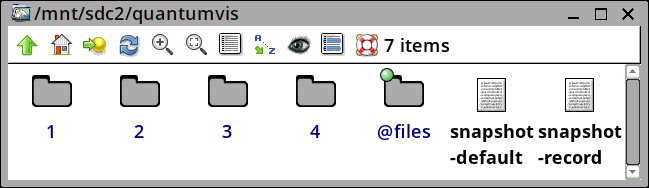
...snapshot #1 is missing, because that s the current default that will be booted into. Whatever is the current default will be filtered-out.
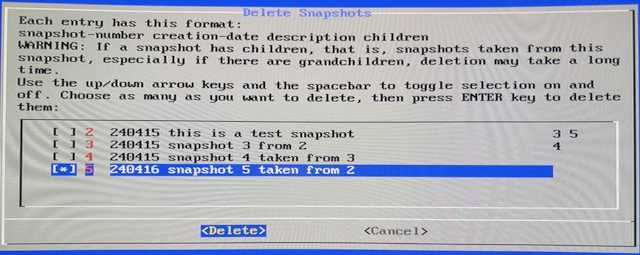
From a bit of online reading, it seems that deleting snapshots can take awhile. For that reason, the children of each snapshot are listed. For example, snapshots 3 and 5 are snapshots of number 2. Number 4 is a snapshot of 3. My reasoning is that snapshots that have children, especially children-of-children, are likely to require a lot more processing to delete.
I have selected number 5, and the next window:
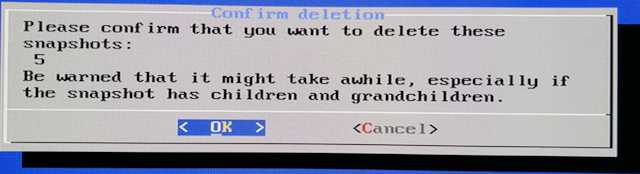
There wasn't much processing to delete it, took the blink of an eye, then this window:
After bootup, it is seen that folder "5" is now gone:
Looking good!
Tags: quirky
QV version 240409 pre-alpha uploaded
Download from here:
https://distro.ibiblio.org/easyos/amd64/releases/void/
The md5sum is:
87a22559d5d7b414e810dbf2d7e36ae3
It is a bit bigger than the previous release, 1.3GB up from 1.1GB. The reason is have set zstd to compression level 3, whereas before it was 15. Want to see if it makes a noticeable difference in app startup time. ...for Firefox on my old Compaq Presario, not noticeably faster.
You will notice that the logo is just the letter "Q". That is just a whimsical thing I tried, wanted to see what it looks like in use ...no, doesn't really "work".
If you want to do a frugal install direct to internal drive, and not bootup QV first on a usb-stick, can do. There is a script, 'qv-installer', that should work on most Linux distros. You will also need the 'mount-img' script. I will post the latest of these two scripts to the forum, here:
https://forum.puppylinux.com/viewtopic.php?p=116553#p116553
Grab those two scripts, remove the false ".gz", set as executable, and put them in /usr/bin or anywhere in the $PATH.
You then need to download 'qv-240409-amd64.img' and open a terminal where-ever it is downloaded to, then run, as the root user:
# qv-installer qv-240409-amd64.img
The script will check that you have all the required utilities and packages installed. For example, 'btrfs-progs' package.
Have fun, feedback welcome at the forum.
Oh yeah, the "update" icon on the desktop. That doesn't work. I
have yet to figure out a strategy for updating.
Tags: quirky
New QV Installer
Easy install to an internal drive. Announced in forum post:
https://forum.puppylinux.com/viewtopic.php?p=116393#p116393
The script is part-manual, part-automatic. Not as sophisticated
as installers in the mainline distros.
Tags: quirky
Jolene's answer to Dolly
I guess just about everyone would have heard Dolly Parton's hit
song "Jolene". That was very early in her career. Here is a TV
performance in 1973:
https://www.youtube.com/watch?v=OTuQ9cKGSdM
Just a year ago, a young lass has replied, from Jolene's perspective:
https://www.youtube.com/watch?v=y_OcGTay52Y
...nice voice
I watched a couple of ILUKA's other videos on YouTube. I'm a
dinosaur, I know, not a fan of modern video songs with lots of
media effects. She has a good voice; where she just sat in front
of the camera and sang, to me is far more effective.
Tags: general
QV version 240403 pre-alpha
For previous news about QV, see this blog category:
https://bkhome.org/news/tag_quirky.html
Things change every day; the directory hierarchy has changed again, yet to be documented.
This is a pre-alpha. Anyone wants to take it for a spin, you are welcome. Let me know of any bugs.
There is still some EasyOS stuff in there, that needs conversion.
Notice the download 'qv-240403-amd64.img' is quite big, 1.2GB. EasyVoid alongside it on Ibiblio is only 913MB. They contain about the same packages, mostly from the Void Linux repository. Squashfs and btrfs are both using zstd; however, squashfs compacts much more efficiently.
Maybe this is useful information if you have an Intel GPU.
Booting on my Lenovo desktop PC, with 8th Gen i3 CPU and Intel
GPU, the QuickSetup window shows that Xorg has chosen the "intel"
Xorg driver. What I notice after a very short time, is text not
displaying properly on the screen; characters missing. I have even
had Xorg freeze.
The solution is to exit from X, then run "xorgwizard" from the
shell prompt. A window will tell you that the intel driver is
using 'sna' acceleration, and will offer to change to 'uxa'. This
fixes it for me.
Feel free to test Lockdown mode, and snapshots. I'm thinking maybe it would be good to have some information on the screen, such as snapshot number and whether Lockdown is on.
A technical note. The drive-image file is populated with zstd:15, meaning compression level 15. However, at bootup, the rootfs '@qv' is mounted with zstd:3. This means that any future writes will be level-3. It was done this way to try and get the drive image as small as possible; however, there is a penalty of slower read times expanding the level-15 files. I might change 15 to 7 in the future.
The desktop "update" icon doesn't work. How to implement updating
will require more thought. You can run the 'xbps' utility and do a
complete package update, so why do we even need a "update" icon?
Well, might need to download some fixes, for example for the
'initrd' file, or update the kernel. QV cannot use the Void
kernels.
Get the 'qv-200403-amd64.img' drive-image file from here:
https://distro.ibiblio.org/easyos/amd64/releases/void/
...write it to a USB-stick using 'dd' or whatever, and boot it.
The github repository has changed since the announcement a few days ago. It is now:
https://github.com/bkauler/woof-quantum-vis
...you can download it; there are scripts in the 'rootfs' folder,
that you run in sequence, and you end up with a
'qv-<date>-amd64.img' file.
However, the host OS will need to be btrfs-aware (btrfs-progs
installed) and have xbps installed. Actually, I haven't tried it
yet, but it should work from a running QV. Make sure you have a
good quality Flash stick or SSD; apart from quality drives being
able to handle more writes, slow cheap Flash sticks will cause
very noticeably longer app startup times.
Feedback is welcome here:
https://forum.puppylinux.com/viewtopic.php?t=11131
Have fun!
Tags: quirky