
Trike simplified steering linkage assembled
A couple of days ago, I posted about a simplified steering linkage that I can put together quickly:
- Trike simplified steering linkage — June 22, 2024
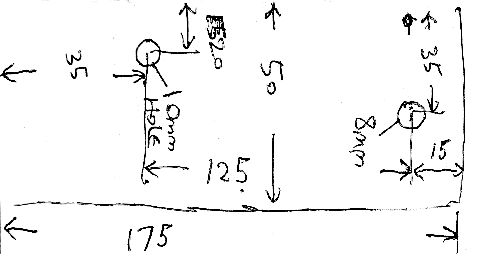
Today manufactured the wheel-knuckle lever extensions. Used 50x3mm cross-section mild steel. Here is a sketch:
Then assembled on the trike:

As stated before, there are lots of compromises with this simple linkage.
Fleshing out a bit more how I calculated the amount that the inner wheel was turning a bit too much...
The SolveSpace diagram shows two concentric circles, going through each wheel. The diagram also shows the angle of each wheel, relative to the trike frame. 90 degrees would be the wheels pointing straight ahead. If the diagram is adjusted so that the outer wheel is following the outer radius, we can subtract the two wheel angles to see how much the inner wheel has turned in or out relative to the outer wheel.
There is a formula for calculating the ideal angle for each wheel: A=atan(L/R)
Where L is the length from the front wheels to the hub of the
rear wheel. In my case 1200mm. R is the radius of the circle while
cornering. A is the angle.
For the example in SolveSpace of inner circle radius 3138mm and outer radius 3583mm, calculating the two required wheel angles:
Aouter=atan(1200/3583)
Ainner=atan(1200/3138)
Aouter=18.52°, Ainner=20.93°
Difference=2.41°
In the SolveSpace diagram, the difference is 3.31°, so the inner wheel has turned 0.9° more than the Ackermann ideal.
EDIT 2024-06-25:
I assembled the arms, so as to evaluate basic steering
functionality:

Have made a list of required modifications,
so tonight will completely dis-assemble the trike. Rebuild will
probably be about a month from now. Intend for it then to be
rideable and will use lock-nuts and thread-lock.
Tags: light